This is an old revision of the document!
Table of Contents
| KUKA KR200/1A | |
|---|---|
| Status | in progress |
| Founder | enleth |
| Source | *soon* |
The Robot!
KUKA VKR200/1A + VKRC1.

Issues so far
KRC1 does not boodDead RAM, fixed using “KIEŁBASA KRAKOWSKA” assorted RAM container.KCP (controller/pendant) displays no imageCCFL (or CCFL driver) was dead. Replaced by long COB LED.KCP display artifacts. Most likely zebra strip issue.Flat cable connecting main board with display in teachpendant has been changed.Dead batteriesCircuit breaker added as a power switch for batteries connection. Need upgrade
Info z listy WAW-S @2022-08
Mamy problem ze zmuszeniem robota do wejścia w tryby pracy - automatyczny AUT, automatyczny zewnętrzny EXT (ze sterowaniem, a właściwie zgodą zewnętrznego sterownika), testowy 1 T1, testowy 2 T2. Obecnie jesteśmy w stanie uzyskać T1, T2 i EXT, ale i tak na około, niewygodnie i zmieniając konfigurację zewnętrznymi złączkami. Problem prędkości próbowałem zrozumieć pół roku temu, jakiś tam pomysł miałem, ale już zdążyłem zapomnieć. Chyba chciałem sprawdzić czy robot nie ma narzuconych ograniczeń w pliku konfiguracyjnym zarówno na T1 i na T2. Tutaj rzeczywiście problemem może być szafa po wersji volkswagen.
Mechanicznie mamy poważny problem objawiający się np. przy ruchach liniowych poziomo. Końcówka robota wyraźnie drga góra-dół co na ten moment eliminuje możliwość wykorzystania go jako CNC, nawet do drewna. Tutaj sprawdziłbym względem czego drga końcówka - przymocował odniesienie do nogi robota, potem bezpośrednio do podstawy. W celu wyeliminowania hipotezy drgania na stalowym stelażu.
Obecnie używamy fusion360, ale jest chujowy. Nie znalazłem dobrej metody na generowanie zwykłego “jedź po tej ścieżce”. Tworzenie addytywne 3D to też dramat. Fusionowy slicer jest totalnie nieintuicyjny i przekonanie go że ma robić warstwy grubości jednej ścieżki graniczy z cudem. Frezowanie 6-axis może wychodzić trochę lepiej bo ma wbudowaną taką operację. Cięcie laserem które rzeczywiście jest po ścieżce, jest z kolei tylko dla 2D. Dobrze byłoby wybrać inny program z wypluwanym wygodnym kodem maszynowym. Zrobienie postprocesora na KRL nie powinno być dużym wyzwaniem.
Admin User Group
- Arbeitsplatz\HKEY_LOCAL_MACHINE\SOFTWARE\KUKA Roboter GmbH\KUKA BOF\OCX Control's\UserMode\PassWord
- KeyFile20 → E:\KeyFiles\key_2.txt (Change to D:\KeyFiles\key_2.txt…)
- PassWord20 → 76 8D 59 37 6D DE C9 0B E6 EC 5A B2
- Create file D:\KeyFiles\key_2.txt containing: glenmorangie
Ctrl-ESC opens Windows menu when working as Admin.
Pressing Shift when booting Win95 disables autostart, which gives access to Windows GUI when no KeyFile is present. (yet)
LCD
Szerokość LCD: 132.5mm; Długość CCFL: 147mm
KVGA (karta graficzna) by default wypuszcza tylko obraz na pendant, (https://www.robot-forum.com/robotforum/kuka-robot-forum/external-vga-monitor/msg57164/#msg57164)
Problem ze złączem/taśmą od LCD rozwiązany tymczasowo poprzez zewnętrzny ekran. KVGA przełączana w tryb duplikowania ekranu na external poprzez SM.COM wrzucony do AUTOEXEC.bat
Złącze LCD naprawione. SM.COM nadal wykorzystywany do uruchomienia zewnętrznego monitora.
Batteries
- 2 * 12V 5Ah, 89x68x98mm (most likely 90x70x99mm) → http://allegro.pl/akumulator-zelowy-agm-12v-5ah-mws-ups-jakosc-i6480276493.html
Manuals
- ping informatic for more
- we have full pre-hacking disk dump [somewhere]
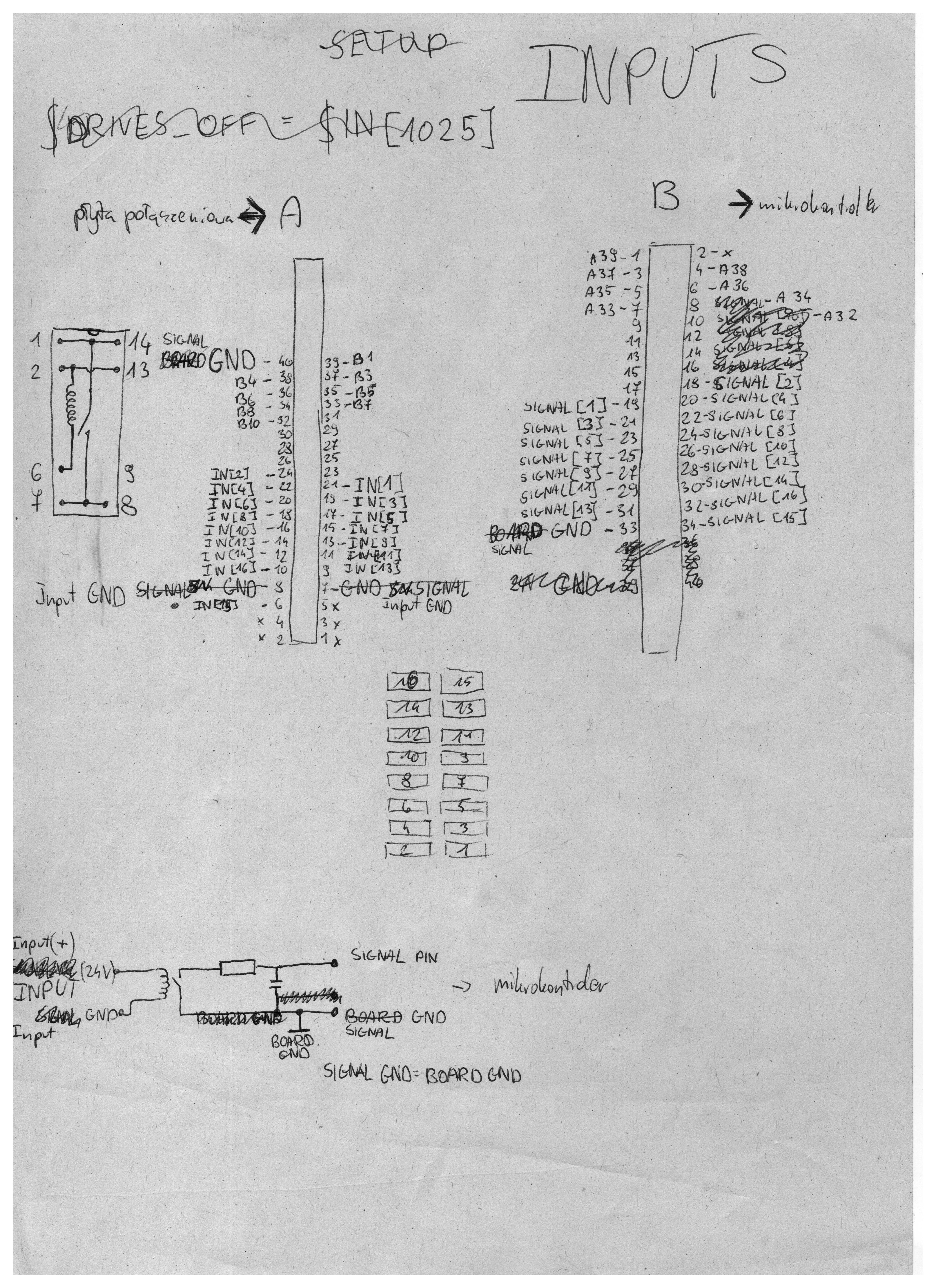
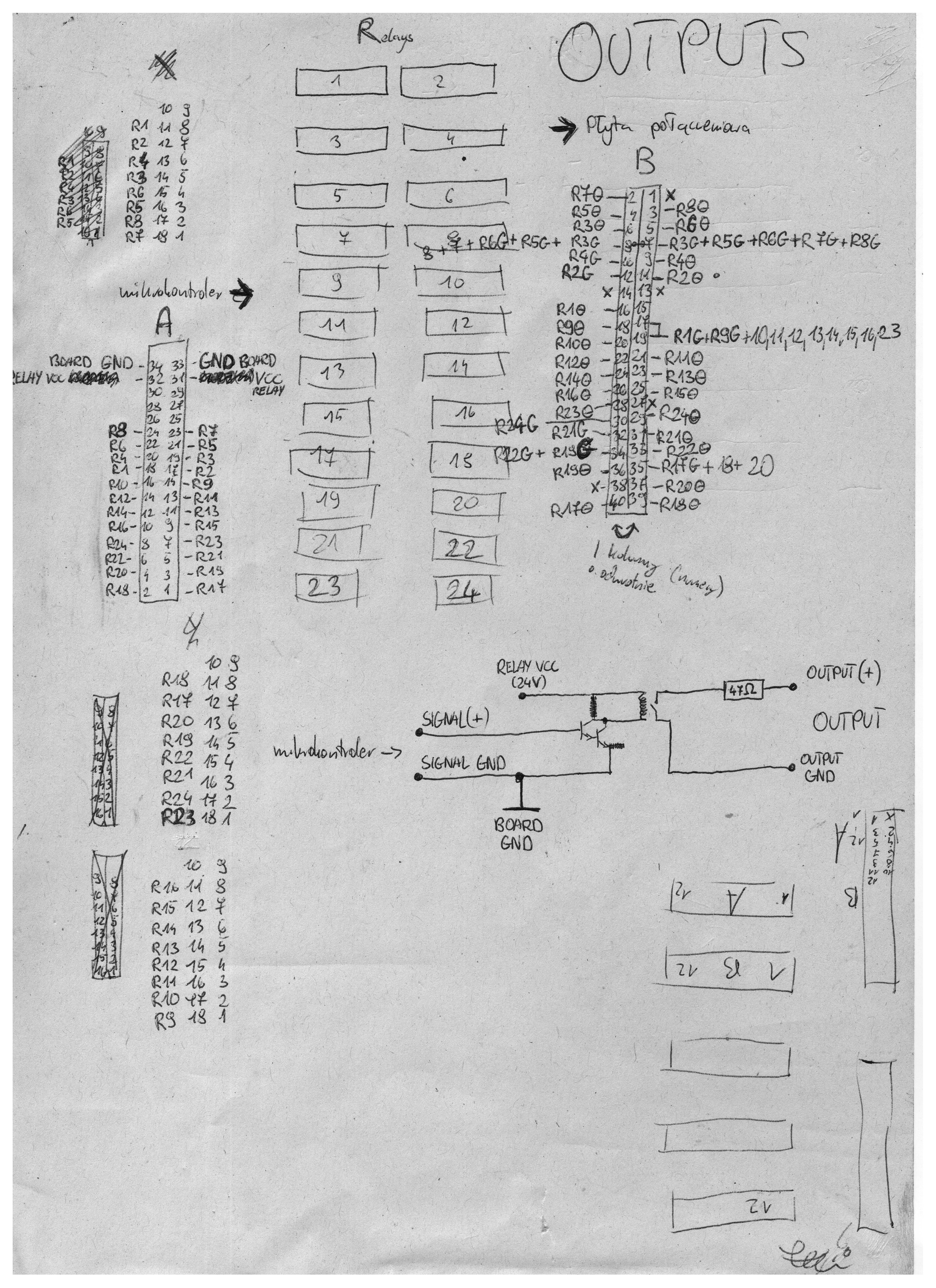
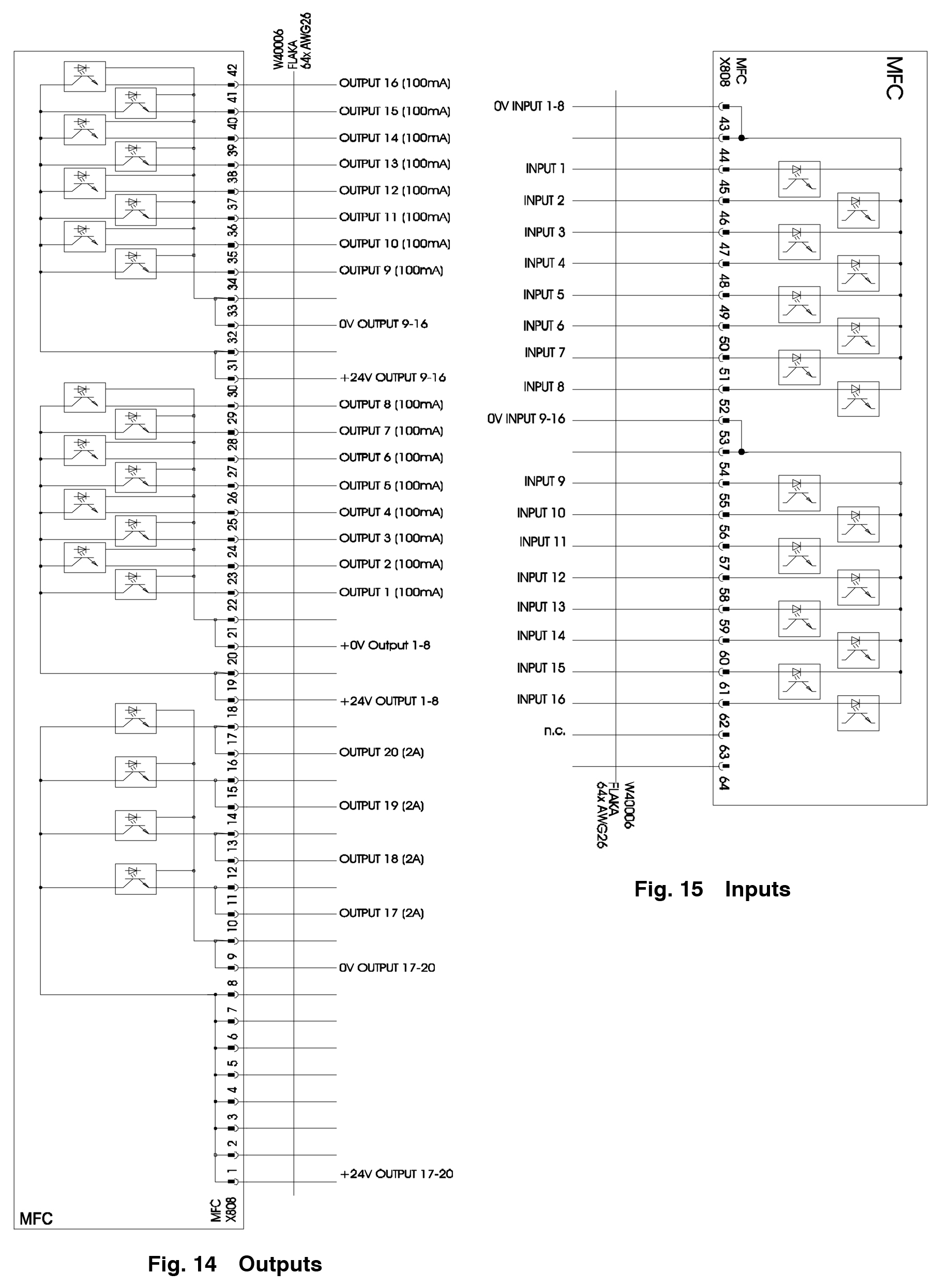
shitowa Dokumentacja
ABIOC = After Bridgeport I/O Card
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Remote control
KVGA hacking
Linki
Postprocesor dla Fusion 360
- Po ściągnięciu usuń .txt - Download